Aansluiten L298N motordriver
Aangezien er bij het printje geen gebruiksaanwijzing zat heb ik diverse websites bekeken.Stapje voor stapje allerlei instellingen uitgeprobeerd om de alles aan de "praat" te krijgen.
En uiteindelijk deze pagina samengesteld, waarmee denk ik iedereen wel uit de voeten kan.
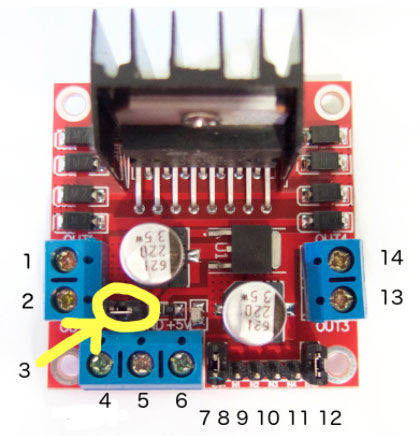 1. DC motor 1 "+" of stappenmotor A+
1. DC motor 1 "+" of stappenmotor A+2. DC motor 1 "-" of stappenmotor A-
3. 12V jumper - haal weg als je een voeding groter dan 12V DC gebruikt
4. sluit hier de voedingsspanning aan die maximaal 35V DC mag zijn
5. GND of massa
6. 5V DC output als de 12V jumper is geplaatst - zie ook punt 3
7. DC motor 1 enable jumper - zie opmerking
8. IN1
9. IN2
10. IN3
11. IN4
12. DC motor 2 enable jumper - zie opmerking
13. DC motor 2 "+" of stappenmotor B+
14. DC motor 2 "-" of stappenmotor B-
Opmerking:
Laat deze jumper zitten als je een stappenmotor gebruikt.
Als het geen probleem is dat de DC motor direct stopt dan kun je deze jumper ook laten zitten.
Verwijder de jumper bij gebruik van een DC motor:
- sluit deze pin aan op een PWM output pin van je Raspberry als je het toerental van de motor wil regelen.
- maak deze pin laag om de motor langzaam te laten stoppen.
- maak deze pin hoog om de motor vrij te geven.
IN1 t/m IN4:
| IN1 | IN2 | Aktie | IN3 | IN4 | Aktie |
|---|---|---|---|---|---|
| Laag | Laag | motor 1 stopt | Laag | Laag | motor 2 stopt |
| Hoog | Laag | motor 1 draait rechtsom | Hoog | Laag | motor 2 draait rechtsom |
| Laag | Hoog | motor 1 draait linksom | Laag | Hoog | motor 2 draait linksom |
| Hoog | Hoog | motor 1 stopt | Hoog | Hoog | motor 2 stopt |
Om de motor in een langzaam tempo te laten stoppen maak je de vrijgavelijn van motor 2 (12) laag.